DamperAnalog (FB)¶
FUNCTION_BLOCK DamperAnalog
Kurzbeschreibung¶
Steuerung eines stetigen Klappenantriebs mit stetiger PositionsrückmeldungTypische Anwendung: Stetige Umluftklappe einer RLT-Anlage
Darstellung¶
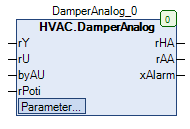
Schnittstellen¶
Eingänge¶
Name Datentyp Wertebereich Initialwert Funktion rY REAL Sollwert - Position rU REAL 0.0 Istwert - Position eAO HVACTYPES.eManNum HVACTYPES.eManNum.Auto, HVACTYPES.eManNum.Man HVACTYPES.eManBin.Auto Betriebsart der Handübersteuerung - Hardware rPoti REAL 0.0 Handwert der Handübersteuerung - Hardware
Ausgänge¶
Name Datentyp Wertebereich Initialwert Funktion rHA REAL Stellsignal Klappenantrieb nach Handübersteuerung rAA REAL Stellsignal Klappenantrieb vor Handübersteuerung xAlarm BOOL Sammelstörung
Sollwerte / Parameter¶
Name Datentyp Wertebereich Initialwert Funktion udiControlTime UDINT 10s ... 600s 150s Meldeverzögerung der Positionsüberwachung rControlDiff REAL 7.0 Maximale Abweichung zwischen Soll- und Istwert der Position xControl BOOL TRUE Freigabe der Positionsüberwachung rManValue REAL 0.0 Handwert eManModeN eMANNUM eMANNUM.Auto, eMANNUM.Man eMANBIN.Auto Betriebsart der Handübersteuerung
Funktionsbeschreibung¶
Stellsignal Klappenantrieb vor Handübersteuerung rAA¶
Das Stellsignal des Klappenantriebs vor Handübersteuerung rAA wird unverändert vom Eingang Sollwert - Position rY übernommen.
Stellsignal Klappenantrieb nach Handübersteuerung rHA¶
Das Stellsignal des Klappenantriebs nach Handübersteuerung rHA entspricht dem Stellsignal des Klappenantriebs vor Handübersteuerung rAA
zusätzlich erweitert um ein Handübersteuermodul.
rAA eManModeN rHA Hinweise X eMANNUM.Auto rAA Handübersteuermodul in Automatik X eMANNUM.Man rManValue Handübersteuermodul in Handbetrieb
Legende: X = beliebig
Sammelstörung xAlarm¶
Die Sammelstörung xAlarm wird aktiviert ( = TRUE ), falls der Betrag der Differenz zwischen dem Stellsignal Klappenantrieb nach Handübersteuerung rHA und
dem Istwert der Position rU während einer Mindestzeitdauer von udiControlTime permanent die maximale Abweichung zwischen Soll- und Istwert der Position
rControlDiff überschreitet.
Gleichzeitig müssen sowohl die Freigabe der Positionsüberwachung xControl aktiv ( = TRUE ) sein und die Betriebsart der Handübersteuerung - Hardware sich in der
Stellung HVACTYPES.eManBin.Auto befinden.
In alle übrigen Fällen ist die Sammelstörung xAlarm nicht aktiviert ( = FALSE ).
Visualisierung¶
Information¶
Element Autoren Datum Version Anmerkungen Funktion Alexander Halter 09.2016 1.0 Ursprungsversion Programmierung Alexander Halter 09.2016 1.0 Ursprungsversion Test Jochen Reu 11.2017 1.0 Ursprungsversion Dokumentation Jochen Reu 11.2017 1.0 Ursprungsversion
Codesys¶
- InOut:
Scope Name Type Initial Comment Input rY REAL Sollwert - Position rU REAL 0 Istwert - Position eAO eManNum HVACTYPES.eManNum.Auto Betriebsart der Handübersteuerung - Hardware rPoti REAL 0 Handwert der Handübersteuerung - Hardware Output rHA REAL Stellsignal Klappenantrieb nach Handübersteuerung rAA REAL Stellsignal Klappenantrieb vor Handübersteuerung xAlarm BOOL Sammelstörung Input udiControlTime UDINT 150 Meldeverzögerung der Positionsüberwachung rControlDiff REAL 7 Maximale Abweichung zwischen Soll- und Istwert der Position xControl BOOL TRUE Freigabe der Positionsüberwachung rManValue REAL 0 Handwert eManModeN eMANNUM eMANNUM.Auto Betriebsart der Handübersteuerung