WHAT IS
3D RAD?
CLICK HERE
TO FIND OUT!
Wheel

By attaching this object to any other object supporting physics you can make wheeled vehicles of any sort.
Each wheel includes a tweakable motor, a brake, a steering system and a suspension.

If this option is not checked, the wheel will only respond to input controls when the object is started by another object, like for example EventOnInput.
You can make the wheel interactive by checking the box next to one or more input controls.
The Delay parameters allow you to set the response time for each control, in seconds (approximately). Please note that delays should be set to 0.0 if proportional controls are used (see ConfigureControls for details).
Also, keep in mind that input controls must be disabled (unchecked) if you want to control the wheel by manipulating its internal values, for example by using a Script object. See internal values table below for more.
Basically the weight of the wheel. As a reference, total mass for one liter of water (1 kg or 2.2 pounds) is about 1.0.
Warning! Setting a total mass too small may cause unpredictable behaviors, including severe processing slowdown.
The first value is the maximum spin supported by the wheel, in rounds per minute (RPM). The second value is the maximum torque provided, considering that it is 100% when spin is below 50 rpm. It then goes from 50% to 100% (when rpm is 70% of maximum allowed) and finally it goes from 100% to 0% (when rpm is maximum allowed).
The following torque graph is for a maximum spin of 4000 rpm:
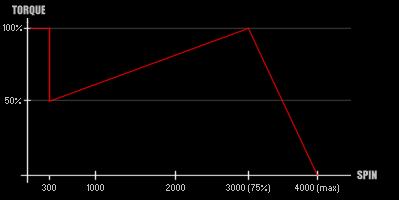
You can set different spin and torque for when the wheel goes reverse. See Throttle above for details.
The bigger the value, the more effective the wheel brake.
Maximum turning angle, in degrees. Note that the speed at which the wheel turns is determined by the Delay specified for the left/right controls, if non-proportional controls are used. See above for details.
Damping weakens the kinetic energy of the wheel. The effect is similar to drag (resistance to motion through a fluid, for example air friction). Setting this value to 1 causes zero damping. Zero produces maximum damping.
Damping can also be applied to rotation. See previous parameter for details.
The higher the factor, the stronger the suspension. A strong suspension usually means less (smaller) oscillations.
The higher the factor, the more absorbing the suspension.
The bounciness of the wheel when colliding with other objects. The smaller the factor, the lower the bounciness. The value must be between 0 and 1.
Note that when two objects collide, the actual restitution is the average of the restitution factors of the two objects.
Resistance encountered when the wheel is skidding laterally. Zero means that there is no resistance. Set a very high value for no-slipping friction (max is 3.402823466e+38).
Note that when two objects collide, the actual friction depends on factors of both objects.
Resistance encountered when the wheel is rolling or applying traction onto the ground. See also Lateral Friction for more.
This list defines how the Wheel object relates to the objects linked to it. The following relationship types are supported:
NOTE: Specifying more than one single object as vehicle body is not recommended. Resulting behavior is undefined.
For information about the remaining controls, please click here.
The following internal parameters can be accessed by using event objects like EventOnValue or Script: